上一篇《OpenCV3-Python卡尔曼滤波器介绍》介绍了OpenCV中Kalman滤波器,本篇来介绍CAMShift算法结合Kalman滤波器来实现行人跟踪的方法。
应用程序遵循以下流程:
<1> 检测第一帧;
<2> 检测后面输入的帧,从场景的开始通过背景分割器来识别场景中的行人;
<3> 为每个行人建立ROI,并利用Kalman/CAMShift来跟踪行人ID;
<4> 检查下一帧是否有进入场景的行人;
1. 类Pedestrian介绍
class Pedestrian(): """ Pedestrian class each pedestrian is composed of a ROI, an ID and a Kalman filter so we create a Pedestrian class to hold the object state """ def __init__(self, id, frame, track_window): """init the pedestrian object with track window coordinates""" # set up the roi self.id = int(id) x,y,w,h = track_window self.track_window = track_window self.roi = cv2.cvtColor(frame[y:y+h, x:x+w], cv2.COLOR_BGR2HSV) #计算ROI的直方图 roi_hist = cv2.calcHist([self.roi], [0], None, [16], [0, 180]) self.roi_hist = cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX) #设置卡尔曼滤波器 self.kalman = cv2.KalmanFilter(4,2) self.kalman.measurementMatrix = np.array([[1,0,0,0],[0,1,0,0]],np.float32) self.kalman.transitionMatrix = np.array([[1,0,1,0],[0,1,0,1],[0,0,1,0],[0,0,0,1]],np.float32) self.kalman.processNoiseCov = np.array([[1,0,0,0],[0,1,0,0],[0,0,1,0],[0,0,0,1]],np.float32) * 0.03 self.measurement = np.array((2,1), np.float32) self.prediction = np.zeros((2,1), np.float32) self.term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1 ) self.center = None #传递当前帧 self.update(frame) def __del__(self): print ("Pedestrian %d destroyed" % self.id) def update(self, frame): # print "updating %d " % self.id hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) back_project = cv2.calcBackProject([hsv],[0], self.roi_hist,[0,180],1) #根据传递的参数,选择采用CAMShift/均值漂移 if args.get("algorithm") == "c": ret, self.track_window = cv2.CamShift(back_project, self.track_window, self.term_crit) pts = cv2.boxPoints(ret) pts = np.int0(pts) self.center = center(pts) cv2.polylines(frame,[pts],True, 255,1) if not args.get("algorithm") or args.get("algorithm") == "m": ret, self.track_window = cv2.meanShift(back_project, self.track_window, self.term_crit) x,y,w,h = self.track_window self.center = center([[x,y],[x+w, y],[x,y+h],[x+w, y+h]]) cv2.rectangle(frame, (x,y), (x+w, y+h), (255, 255, 0), 2) #Updates the predicted state from the measurement. self.kalman.correct(self.center) #Computes a predicted state. prediction = self.kalman.predict() cv2.circle(frame, (int(prediction[0]), int(prediction[1])), 4, (255, 0, 0), -1) # fake shadow cv2.putText(frame, "ID: %d -> %s" % (self.id, self.center), (11, (self.id + 1) * 25 + 1), font, 0.6, (0, 0, 0), 1, cv2.LINE_AA) # actual info cv2.putText(frame, "ID: %d -> %s" % (self.id, self.center), (10, (self.id + 1) * 25), font, 0.6, (0, 255, 0), 1, cv2.LINE_AA)
2. 主函数内容
#! /usr/bin/python """Surveillance Demo: Tracking Pedestrians in Camera Feed The application opens a video (could be a camera or a video file) and tracks pedestrians in the video. """ __author__ = "joe minichino" __copyright__ = "property of mankind." __license__ = "MIT" __version__ = "0.0.1" __maintainer__ = "Joe Minichino" __email__ = "joe.minichino@gmail.com" __status__ = "Development" import cv2 import numpy as np import os.path as path import argparse parser = argparse.ArgumentParser() parser.add_argument("-a", "--algorithm", help = "m (or nothing) for meanShift and c for camshift") args = vars(parser.parse_args()) def center(points): """calculates centroid of a given matrix""" x = (points[0][0] + points[1][0] + points[2][0] + points[3][0]) / 4 y = (points[0][1] + points[1][1] + points[2][1] + points[3][1]) / 4 return np.array([np.float32(x), np.float32(y)], np.float32) font = cv2.FONT_HERSHEY_SIMPLEX ################################################################## ###注意:此处需要添加类Pedestrian的内容才可运行此例程,可参考1中内容### ################################################################## def main(): camera = cv2.VideoCapture("./768x576.avi") #设置20帧作为影响背景模型的帧 history = 20 # KNN background subtractor bs = cv2.createBackgroundSubtractorKNN() # MOG subtractor # bs = cv2.bgsegm.createBackgroundSubtractorMOG(history = history) # bs.setHistory(history) # GMG # bs = cv2.bgsegm.createBackgroundSubtractorGMG(initializationFrames = history) #创建主显示窗口 cv2.namedWindow("surveillance") pedestrians = {} firstFrame = True frames = 0 fourcc = cv2.VideoWriter_fourcc(*'XVID') out = cv2.VideoWriter('output.avi',fourcc, 20.0, (640,480)) while True: print (" -------------------- FRAME %d --------------------" % frames) grabbed, frame = camera.read() if (grabbed is False): print ("failed to grab frame.") break fgmask = bs.apply(frame) # this is just to let the background subtractor build a bit of history if frames < history: frames += 1 continue #通过对前景掩模采用膨胀和腐蚀的方法来识别斑点及其周围边框 th = cv2.threshold(fgmask.copy(), 127, 255, cv2.THRESH_BINARY)[1] th = cv2.erode(th, cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3,3)), iterations = 2) dilated = cv2.dilate(th, cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (8,3)), iterations = 2) image, contours, hier = cv2.findContours(dilated, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) #对第一帧中的行人轮廓进行实例化 counter = 0 for c in contours: if cv2.contourArea(c) > 500: (x,y,w,h) = cv2.boundingRect(c) cv2.rectangle(frame, (x,y), (x+w, y+h), (0, 255, 0), 1) # only create pedestrians in the first frame, then just follow the ones you have if firstFrame is True: pedestrians[counter] = Pedestrian(counter, frame, (x,y,w,h)) counter += 1 #对于检测到的行人,都执行update()函数来传递当前帧 for i, p in pedestrians.items(): p.update(frame) #只跟踪第一帧中已有的人 firstFrame = False frames += 1 cv2.imshow("surveillance", frame) out.write(frame) if cv2.waitKey(110) & 0xFF == ord('q'): break out.release() camera.release() cv2.destroyAllWindows() if __name__ == "__main__": main()
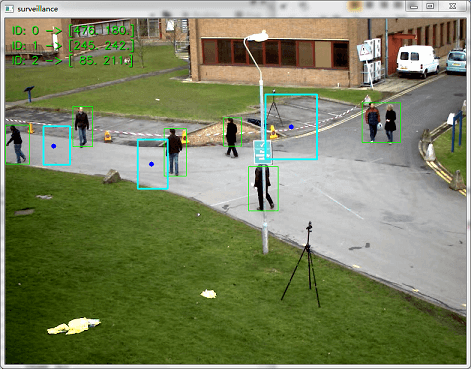
3. 实验结果