目标跟踪是计算机视觉中的一个重要研究方向,有着广泛的应用,如:视频监控,无人驾驶等。
本文介绍的目标跟踪方法,即通过Opencv-Python中的图像处理方法,实现对摄像头视频中移动目标的简单定位,并进行后续处理。
1. 运动目标跟踪
实现当摄像头中物体移动时,绘制对应的区域的边界框,并进行跟踪检测。
import cv2 import numpy as np getStructuringElement camera = cv2.VideoCapture(0) ''' cv2.getStructuringElement(shape, ksize[, anchor]) → retval Returns a structuring element of the specified size and shape for morphological operations. Parameters: shape – Element shape that could be one of the following: (1) MORPH_RECT - a rectangular structuring element: (2)MORPH_ELLIPSE - an elliptic structuring element, that is, a filled ellipse inscribed into the rectangle Rect(0, 0, esize.width, 0.esize.height) (3) MORPH_CROSS - a cross-shaped structuring element (4)CV_SHAPE_CUSTOM - custom structuring element (OpenCV 1.x API) ksize – Size of the structuring element. ''' es = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (10,10)) kernel = np.ones((5,5),np.uint8) background = None while (True): ret, frame = camera.read() #读取一帧太虚想 if background is None: background = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) background = cv2.GaussianBlur(background, (21, 21), 0) continue #将帧转换为灰阶 gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) ''' 对灰度图像进行高斯模糊处理 实际应用中,每个输入的视频都会因自然振动、光照变化或摄像头本身等原因产生噪声。平滑处理能减少在运动和跟踪时产生的噪声 ''' gray_frame = cv2.GaussianBlur(gray_frame, (21, 21), 0) #完成对帧的灰度转换和平滑后,就可计算与背景帧的差异,并获取一个差分图 diff = cv2.absdiff(background, gray_frame) #利用阈值来获取黑白图像 diff = cv2.threshold(diff, 80, 255, cv2.THRESH_BINARY)[1] #通过膨胀(dilate),对孔和缺陷进一步处理 diff = cv2.dilate(diff, es, iterations = 2) #获取图像中的目标轮廓 image, cnts, hierarchy = cv2.findContours(diff.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) #给目标轮廓绘制对应的边界框 for c in cnts: if cv2.contourArea(c) < 1500: continue (x, y, w, h) = cv2.boundingRect(c) cv2.rectangle(frame, (x, y), (x + w, y + h), (255, 255, 0), 2) #显示图像 cv2.imshow("contours", frame) cv2.imshow("dif", diff) if cv2.waitKey(100) & 0xff == ord("q"): break camera.release() cv2.destroyAllWindows()
2. 实验结果
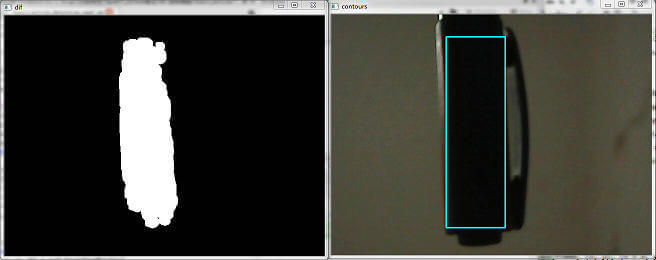
对于简单目标,该跟踪结果相当准确,但是,该方法需要提前设置“默认”帧作为背景。在一些情况下,由于光照变化频繁,这种处理方法就显得很不灵活,因此,需要在系统中引入更智能的方法,即:背景分割器。